<!-- #branding

Robotics projects
Robot gives you the complete step-by-step instructions for 15 different easy robotics projects. Learn everything from how to make a wall avoiding robot, to a “drunken” robot and even how to make your robot solar powered.
most popular project-sharing community on the Internet. We provide easy publishing tools to enable passionate, creative people like you to share their most innovative projects, recipes, skills, and ideas. : crafts, art, electronics, kids, home improvement, pets, outdoors, reuse, bikes, cars, robotics, food, decorating, woodworking, costuming, games, and more. Check it out today!

most popular project-sharing community on the Internet. We provide easy publishing tools to enable passionate, creative people like you to share their most innovative projects, recipes, skills, and ideas. : crafts, art, electronics, kids, home improvement, pets, outdoors, reuse, bikes, cars, robotics, food, decorating, woodworking, costuming, games, and more. Check it out today!
Pocket Drunken Robot
Super Simple Beginners Robot

Continue reading →
http://abhimanyucreative.blogspot.in/2012/11/robotics-projects.html
Posted in Uncategorized
Leave a comment
ECE 5th SEM IMP QUESTIONS
CONTROL SYSTEMS

Control Systems
1) Define transfer function.
2) What are the basic elements used for modeling mechanical rotational system?
3) Name two types of electrical analogous for mechanical system.
4) What is block diagram?
5) What is the basis for framing the rules of block diagram reduction technique?
6) What is a signal flow graph?
7) Write Definitions /Short Notes on:
- System
- Control System Reference Input
- Output
- Feedback element
8) Classify Control system.
9) Differentiate between Open Loop and Closed Loop Control System.
10) Explain importance of Feedback system.
11) Write the rules of Block Diagram Reduction.
12) Explain Mason’s Gain Formula.
13) Write the differential equations governing the Mechanical system shown in fig. and determine the transfer function.
Continue reading →
http://www.abhimanyucreative.blogspot.in/
Posted in Uncategorized
Leave a comment
How to build your first Robo
http://abhimanyucreative.blogspot.in/2012/11/how-to-build-your-first-robo.html
It is really easy, and it does not involve knowledge of electronics to get you started with robot-building.
Focus in here is on the absolute necessary to get the basics covered.
This is meant to be an eye-opener, after building this, you can build anything and control any electronic device!
Sounds crazy? It is true, you just need to try it to understand how much power is in some of the chips you can buy for a few bucks today. Welcome to the world of microcontrollers
The programming example I write in the end is to make this robot what you would call “wall avoiding” (it will sniff around and explore based on which objects it meets, what is on the left, right and ahead), but it can be programmed into anything – easily. If interest is shown I will provide more programs for it.

http://abhimanyucreative.blogspot.in/2012/11/how-to-build-your-first-robo.html

The 28 pin project board in this package is like a game of Mario Bros; Fun and full of extras and hidden features, making you want to play over and again. This includes the main brain, the PICAXE-28X1.
It is really easy, and it does not involve knowledge of electronics to get you started with robot-building.
Focus in here is on the absolute necessary to get the basics covered.
This is meant to be an eye-opener, after building this, you can build anything and control any electronic device!
Sounds crazy? It is true, you just need to try it to understand how much power is in some of the chips you can buy for a few bucks today. Welcome to the world of microcontrollers
The programming example I write in the end is to make this robot what you would call “wall avoiding” (it will sniff around and explore based on which objects it meets, what is on the left, right and ahead), but it can be programmed into anything – easily. If interest is shown I will provide more programs for it.
http://abhimanyucreative.blogspot.in/2012/11/how-to-build-your-first-robo.html
The 28 pin project board in this package is like a game of Mario Bros; Fun and full of extras and hidden features, making you want to play over and again. This includes the main brain, the PICAXE-28X1.
Continue reading →
http://abhimanyucreative.blogspot.in/2012/11/robotics-projects.html
Posted in Uncategorized
Leave a comment
Super Simple Beginners Robot
This little robot is nothing more than a simple plywood platform that carries a couple of modified model airplane servos as the main drive system, a microcontroller and a IR sensor. I designed in plenty of room to expand and add on. You should be able to build it in about 3 hours if you have the parts on hand.
The microcontroller I chose is the OOPic R. I picked this micro because the dozens of built in objects and sample codes make it easy for the beginner to get up and running quickly. They can be found from any of the major robot parts suppliers for usually less than 60 bucks. Get the starter kit as it has a programming cable and battery clip included.
You can use any microcontroller as long as you can plug a servo directly into it (that shortens the list, lol).
The servos listed are all Hitec HS-311 model airplane servos found at nearly any hobby shop for less than 10 bucks in some cases.
The IR sensor is a Sharp GP2D12 Analog unit available from Digikey . Any of the GP2D12XXX analog series will do the job.
The Tailwheel is a simple Dubro .20-.40 model airplane 1″ wheel with mount. Pick one up at the hobby shop where you get your servos.
The wood base is a scrap piece of 1/4 inch birch plywood and the servo / sensor mount is a scrap piece of just about anything wooden. I used a piece of fir.
I made the billet aluminum wheels myself but you can use any wheel designed for servo attachment.
The rest of the robot consists of a few screws and some electrical standoffs
http://abhimanyucreative.blogspot.in/2012/11/super-simple-beginners-robot.html

Tools and Materials

Tools:
The microcontroller I chose is the OOPic R. I picked this micro because the dozens of built in objects and sample codes make it easy for the beginner to get up and running quickly. They can be found from any of the major robot parts suppliers for usually less than 60 bucks. Get the starter kit as it has a programming cable and battery clip included.
You can use any microcontroller as long as you can plug a servo directly into it (that shortens the list, lol).
The servos listed are all Hitec HS-311 model airplane servos found at nearly any hobby shop for less than 10 bucks in some cases.
The IR sensor is a Sharp GP2D12 Analog unit available from Digikey . Any of the GP2D12XXX analog series will do the job.
The Tailwheel is a simple Dubro .20-.40 model airplane 1″ wheel with mount. Pick one up at the hobby shop where you get your servos.
The wood base is a scrap piece of 1/4 inch birch plywood and the servo / sensor mount is a scrap piece of just about anything wooden. I used a piece of fir.
I made the billet aluminum wheels myself but you can use any wheel designed for servo attachment.
The rest of the robot consists of a few screws and some electrical standoffs
http://abhimanyucreative.blogspot.in/2012/11/super-simple-beginners-robot.html
Tools and Materials
Parts list:
-ooPic R Microcontroller (http://www.thebotshop.com/)
(note – You can use whichever microcontroller you are comfortable with)
-Sharp GP2D12 With wired JST connector
-Billet Aluminum Wheels/Tires (or equivelent)
-Hitec HS-311 Servos, Modified
-Super Glue
-.5 X 1 inch Double Sided Tape
-1/4 inch Plywood and a piece of scrap wood
-Dubro .20-.40 RC Airplane Tailwheel assmbly
-Misc. spaces/standoffs and screws/nuts-9 Volt battery
-Heat shrink tubing 1/16 x 3 inches
-3 standard female crimp pins (do not panic if you cant get them)
-Paint *optional
-9 volt battery
Tools:
-Misc Small Screwdrivers
-Needle Nose Pliers
-Drill and bits
-Saw
-Soldering Iron
-Solder
-Sandpaper
-Sharp Pencil
-Ruler
Continue reading →
http://abhimanyucreative.blogspot.in/2012/11/robotics-projects.html
Posted in Uncategorized
Leave a comment
Pocket Drunken Robot
Parts
- 1 vibrator motor from a pager or cell phone. (I used these. You can find the same motor here and here, though it seems distributors keep selling out. Just about any tube-shaped vibration motor with two metal tabs on the end will work. Search for more.)
- 1 AG13 button cell battery. A common watch battery that also goes by the aliases 357A, L1154, LR44, GPA76 or PX76A.
- 1 square inch of sheet tin, copper or other easy to work with metal sheeting. You can probably use a tin can but it might be hard to work with. I’ll be using 0.008″ sheet tin from the local hobby store.
- The PDF template linked below.


-
Tools
- Pliers
- Tin snips. (or old crafty scissors you don’t mind messing up to cut some tin.)
Continue reading →
http://abhimanyucreative.blogspot.in/
Posted in Uncategorized
Leave a comment
Robotics projects
Robot gives you the complete step-by-step instructions for 15 different easy robotics projects. Learn everything from how to make a wall avoiding robot, to a “drunken” robot and even how to make your robot solar powered.
most popular project-sharing community on the Internet. We provide easy publishing tools to enable passionate, creative people like you to share their most innovative projects, recipes, skills, and ideas. : crafts, art, electronics, kids, home improvement, pets, outdoors, reuse, bikes, cars, robotics, food, decorating, woodworking, costuming, games, and more. Check it out today!

Robot gives you the complete step-by-step instructions for 15 different easy robotics projects. Learn everything from how to make a wall avoiding robot, to a “drunken” robot and even how to make your robot solar powered.
most popular project-sharing community on the Internet. We provide easy publishing tools to enable passionate, creative people like you to share their most innovative projects, recipes, skills, and ideas. : crafts, art, electronics, kids, home improvement, pets, outdoors, reuse, bikes, cars, robotics, food, decorating, woodworking, costuming, games, and more. Check it out today!
Continue reading →
http://abhimanyucreative.blogspot.in/2012/11/robotics-projects.html
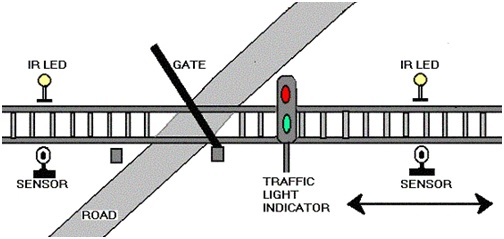
Automatic Railway Gate Control & Track Switching
Present project is designed using 8051 microcontroller to avoid railway accidents happening at unattended railway gates, if implemented in spirit. This project utilizes two powerful IR transmitters and two receivers; one pair of transmitter and receiver is fixed at up side (from where the train comes) at a level higher than a human being in exact alignment and similarly the other pair is fixed at down side of the train direction. Sensor activation time is so adjusted by calculating the time taken at a certain speed to cross at least one compartment of standard minimum size of the Indian railway. We have considered 5 seconds for this project. Sensors are fixed at 1km on both sides of the gate. We call the sensor along the train direction as ‘foreside sensor’ and the other as ‘aft side sensor’. When foreside receiver gets activated, the gate motor is turned on in one direction and the gate is closed and stays closed until the train crosses the gate and reaches aft side sensors. When aft side receiver gets activated motor turns in opposite direction and gate opens and motor stops. Buzzer will immediately sound at the fore side receiver activation and gate will close after 5 seconds, so giving time to drivers to clear gate area in order to avoid trapping between the gates and stop sound after the train has crossed.


The same principle is applied for track switching. Considering a situation wherein an express train and a local train are traveling in opposite directions on the same track; the express train is allowed to travel on the same track and the local train has to switch on to the other track. Two sensors are placed at the either sides of the junction where the track switches. If there’s a train approaching from the other side, then another sensor placed along that direction gets activated and will send an interrupt to the controller. The interrupt service routine switches the track. Indicator lights have been provided to avoid collisions. Here the switching operation is performed using a stepper motor. Assuming that within a certain delay, the train has passed the track is switched back to its original position, allowing the first train to pass without any interruption. This concept of track switching can be applied at 1km distance from the stations.
The project is simple to implement and subject to further improvement.
Gate Control:
Railways being the cheapest mode of transportation are preferred over all the other means .When we go through the daily newspapers we come across many railway accidents occurring at unmanned railway crossings. This is mainly due to the carelessness in manual operations or lack of workers. We, in this project has come up with a solution for the same. Using simple electronic components we have tried to automate the control of railway gates. As a train approaches the railway crossing from either side, the sensors placed at a certain distance from the gate detects the approaching train and accordingly controls the operation of the gate. Also an indicator light has been provided to alert the motorists about the approaching train.
Track Switching
Using the same principle as that for gate control, we have developed a concept of automatic track switching. Considering a situation wherein an express train and a local train are travelling in opposite directions on the same track; the express train is allowed to travel on the same track and the local train has to switch on to the other track. Indicator lights have been provided to avoid collisions .Here the switching operation is performed using a stepper motor. In practical purposes this can be achieved using electromagnets.
Continue reading →
Posted in Uncategorized
Leave a comment

No comments:
Post a Comment